

 联系我们
联系我们

工博士机器人技术有限公司是一家集研发、生产、销售、技术服务于一体的专注于自动化、智能化设备生产和机器人系统集成应用的科技型企业,与ABB、库卡KUKA、发那科FANUC、安川YASKAWA、欧地希OTC、川崎Kawasaki、遨博AUBO、现代HYUNDAI、电装DENSO、欧姆龙OMRON、爱普生EPSON等机器人公司签订了战略合作关系。
公司业务范围:
◆机器人本体及配套产品销售、机器人应用技术培训服务;
◆机器人在焊接、切割、搬运、激光技术、机床上下料、钣金折弯、锻造等领域的系统集成应用;
◆机器人变位机、导轨、防护工作房、焊接工装夹具等系统周边设备的设计和生产。
地址:上海市嘉定区南翔镇众仁路399号B座20楼2007室(王工:18616566200)
----------------------------------------------------------------------------------------------------------
一、库卡机器人启动方式了解
1、手动连续启动方式
(1)说明
在手动操纵模式下,手动选择要运行的程序,然后手动上电和手动运行程序的基本操作。
(2)大致操作步骤
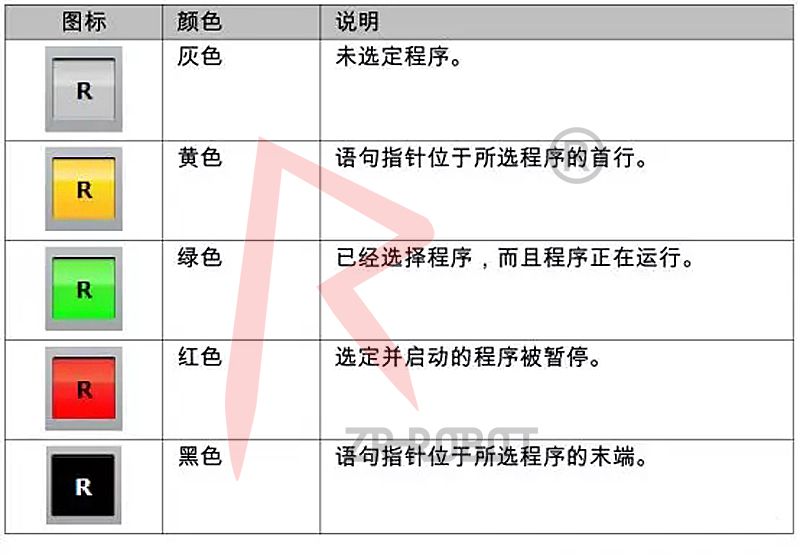
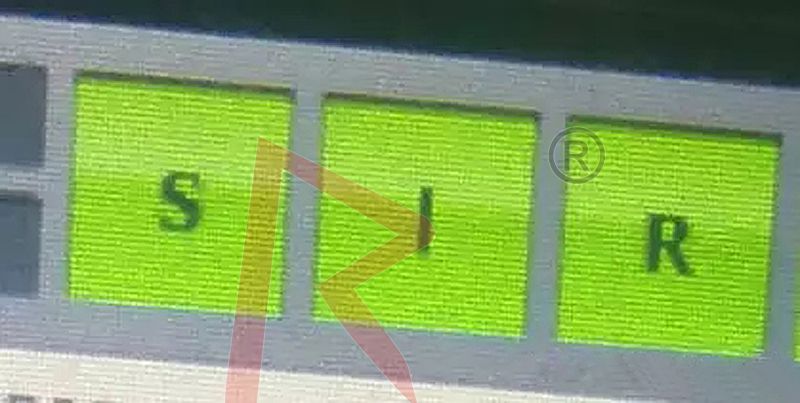
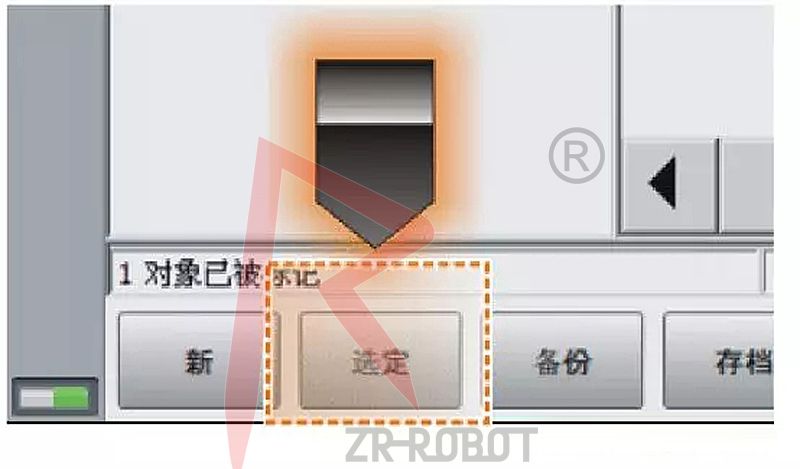
A:编写程序和调试记录好点位等,然后手动模式下选定要运行的程序,选定程序后机器人状态栏的R标识为黄色,程序执行指针光标在首行,程序状态如下:
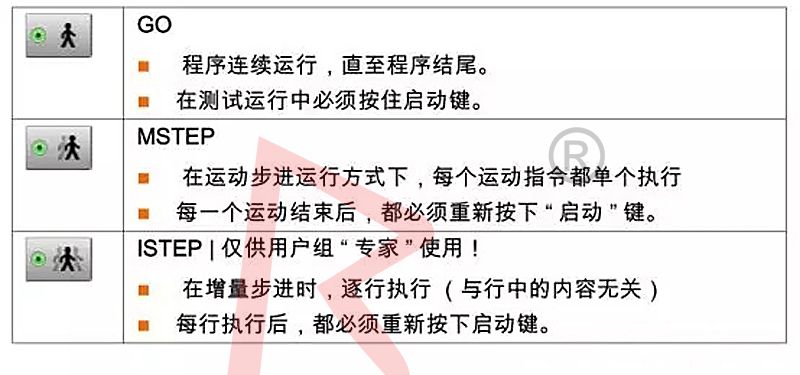
B:手动模式下,设定好机器人运行为连续运行模式,即状态栏为人走状态;
C:手动模式下机器人运行速度设定看情况进行设定,一般为10%——50%之间都可以;

D:给库卡机器人手动上电,按下库卡示教器kukasmartpad使能上电按钮不松开,如下图:
上电后示教器上状态栏状态:
E:按下示教器上的播放按键,则选择的程序就可以正常运行;

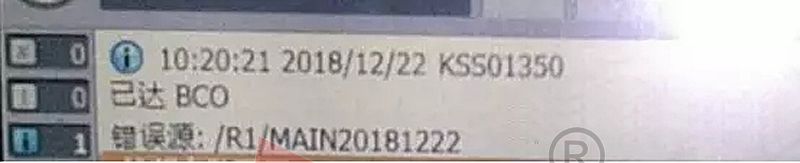
F:机器人次启动时候,会低速运行到个点位,当机器人到达点位以后会停止并且报已达BCO,这里BCO是让机器人首次运行运行时候到达安全点位pHome,确保机器人安全,这时候我们还需要再次按下启动按键,机器人正式正常运行程序;
注意:BCO是BBlockcoincidence(即程序段重合)的缩写。重合意为“一致”及“时间/空间事件的会合”。如果选定的运动语句包括PTP运行指令,则BCO运行将作为PTP运动从实际位置移动到目标位置。如果选定的运动语句包括LIN或CIRC,则BCO运行将作为LIN运动被执行。观察此运动,防止碰撞。在BCO运行中速度自动降低。
机器人正常运行状态:
2、自动运行方式
(1)自动运行说明
库卡机器人处于自动运行时,先要在手动状态时候选择需要运行的程序,然后通过钥匙开关切换机器人到自动运行状态,给机器人上电,然后启动机器人运行程序,让机器人先到达BCO安全参考的,然后在按下启动按钮,机器人就可以正常运行程序。
(2)操作步骤
A:编写程序并且调试程序等;
B:手动状态选择需要运行的程序;
C:手动状态时候上电运行程序,机器人速度调节到合适速度;
D:然机器人到达BCO点位,然后停止机器人;
E:手动旋转示教器上面的钥匙开关,切换机器人为AOTU自动运行模式;

F:上电和确认提示信息等,如果机器人有错误报警不确认机器人将不能运行;

G:自动运行状态速度修改;
H:启动机器人正常运行。
3、外部选择mian程序启动
(1)说明
外部选择main等程序启动,是指在手动状态下,编写好程序和调试好程序,利用mian程序把各个全局子程序调用等,执行某个特点功能任务。在编辑和调试好程序后,可以手动状态下选定main程序,并且手动运行至BCO安全参考点;然后切换到外部运行状态,再通过外部IO执行主程序main的操作。
(2)大致步骤如下
A:编写主程序main和其他全局子程序或者局部子程序等,通过程序调用在主程序main中编写好程序,并且调试好所有程序等待运行;
B:选定main程序,并且手动运行到达BCO安全参考点,然后停止机器人;
C:这里之后可以去配置外部IO启动,配置好后对应接线,这里可以接外部按钮或者通过PLC启动都可以,一般方便测试可以先接外部按钮即可,接线之后需要验证接线是否正确;库卡机器人配置外部IO启动好之后不需要重启就可以使用;
D:通过kukasmartpad钥匙开关切换机器人到外部运行状态;
E:然后通过外部IO启动机器人程序即可,具体步骤见下面举例;
4、外部cell程序通过IO选择程序启动
(1)说明
外部自动选择cell程序启动方式,是指在库卡机器人未选择任何程序,打到机器人外部启动方式,然后关机重启(或者断电重启),机器人会自动选择cell程序,然后通过外部IO控制机器人启动停止暂停和选择不同程序编号执行不同程序的过程。也即程序cell.src是外部自动的主程序,机器人会在EXT模式关机重新开机后会自动选定进入,用户自定义的程序需要在cell.src里插入被其调用。
(2)操作步骤
A:编写程序并且调试好程序等待外部运行;
B:这里可以把机器人自动回去checkpHome去掉,但要充分考虑机器人开机安全,另外编写机器人自动回去安全参考点程序并调用;
C:机器人外部运行IO配置;
D:机器人外部运行IO接线;
E:机器人不选择任何程序,旋钮钥匙开关切换机器人为外部运行模式,关机重启(或者断电重启);
F:机器人重启之后,会自动选择cell.src主程序;
G:根据配置的IO,对机器人进行复位、上电、启动、暂停等操作。
二、库卡机器人外部启动cell程序修改和程序
1、外部启动cell.src主程序新建模板
DEF Cell ( )
;EXT EXAMPLE1 ( )
;EXT EXAMPLE2 ( )
;EXT EXAMPLE3 ( )
INIT
BASISTECH INI
CHECK HOME
PTP HOME Vel=100 % DEFAULT
AUTOEXT INI
LOOP
P00 (#EXT_PGNO,#PGNO_GET,DMY[],0 )
SWITCH PGNO ; selec with Programnumber
CASE 1
P00 (#EXT_PGNO,#PGNO_ACKN,DMY[],0 ) ; Reset Progr.No.-Request
;EXAMPLE1 ( ) ; Call User-Program
CASE 2
P00 (#EXT_PGNO,#PGNO_ACKN,DMY[],0 ) ; Reset Progr.No.-Request
;EXAMPLE2 ( ) ; Call User-Program
CASE 3
P00 (#EXT_PGNO,#PGNO_ACKN,DMY[],0 ) ; Reset Progr.No.-Request
;EXAMPLE3 ( ) ; Call User-Program
DEFAULT
P00 (#EXT_PGNO,#PGNO_FAULT,DMY[],0 )
ENDSWITCH
ENDLOOP
END
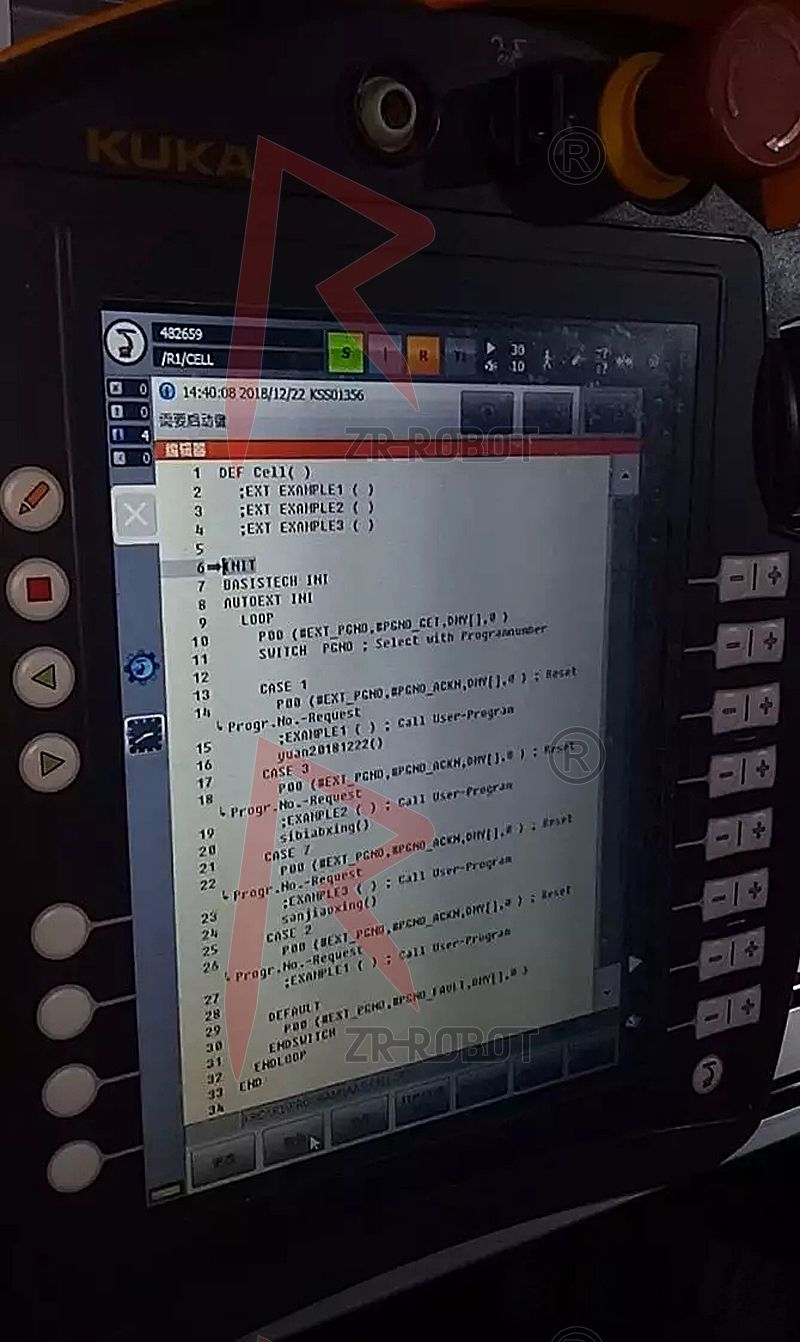
2、外部启动cell.src主程序修改后
DEF Cell( )
;EXT EXAMPLE1 ( )
;EXT EXAMPLE2 ( )
;EXT EXAMPLE3 ( )
INIT
BASISTECH INI
AUTOEXT INI
LOOP
P00 (#EXT_PGNO,#PGNO_GET,DMY[],0 )
SWITCH PGNO ; selec with Programnumber
CASE 1
yuan20181222()
CASE 2
P00 (#EXT_PGNO,#PGNO_ACKN,DMY[],0 ) ; Reset Progr.No.-Request
;EXAMPLE2 ( ) ; Call User-Program
sibiabxing()
CASE 3
P00 (#EXT_PGNO,#PGNO_ACKN,DMY[],0 ) ; Reset Progr.No.-Request
;EXAMPLE3 ( ) ; Call User-Program
sanjiaoxing()
CASE 4
P00 (#EXT_PGNO,#PGNO_ACKN,DMY[],0 ) ; Reset Progr.No.-Request
;EXAMPLE1 ( ) ; Call User-Program
DEFAULT
P00 (#EXT_PGNO,#PGNO_FAULT,DMY[],0 )
ENDSWITCH
ENDLOOP
END
3、各个其他子程序
(1)yuan20181222() 全局子程序圆
DEF yuan20181222( )
INI
PTP P6 Vel=100 % PDAT1 Tool[1]:TOOL1 Base[0]
LIN P1 Vel=1 m/s CPDAT1 Tool[1]:TOOL1 Base[0]
CIRC P2 P3 Vel=1 m/s CPDAT2 Tool[1]:TOOL1 Base[0]
CIRC P4 p1 Vel=1 m/s CPDAT3 Tool[1]:TOOL1 Base[0]
PTP p6 Vel=100 % PDAT2 Tool[1]:TOOL1 Base[0]
END
(2)sibiabxing() 全局子程序四边形
DEF SIBIABXING( )
INI
PTP P1 Vel=100 % PDAT1 Tool[1]:TOOL1 Base[0]
LIN P2 Vel=1 m/s CPDAT1 Tool[1]:TOOL1 Base[0]
LIN P3 Vel=1 m/s CPDAT2 Tool[1]:TOOL1 Base[0]
LIN P4 Vel=1 m/s CPDAT3 Tool[1]:TOOL1 Base[0]
LIN P5 Vel=1 m/s CPDAT5 Tool[1]:TOOL1 Base[0]
LIN P2 Vel=1 m/s CPDAT4 Tool[1]:TOOL1 Base[0]
PTP P1 Vel=100 % PDAT3 Tool[1]:TOOL1 Base[0]
END
(3)sanjiaoxing() 全局子程序三角形
DEF SANJIAOXING( )
DECL INT C
INI
PTP P1 Vel=100 % PDAT1 Tool[1]:TOOL1 Base[0]
FOR C=1 TO 3
LIN P2 Vel=1 m/s CPDAT1 Tool[1]:TOOL1 Base[0]
LIN P3 Vel=1 m/s CPDAT2 Tool[1]:TOOL1 Base[0]
LIN P4 Vel=1 m/s CPDAT3 Tool[1]:TOOL1 Base[0]
LIN P2 Vel=1 m/s CPDAT4 Tool[1]:TOOL1 Base[0]
ENDFOR
PTP P1 Vel=100 % PDAT2 Tool[1]:TOOL1 Base[0]
END
三、外部启动各项IO配置说明
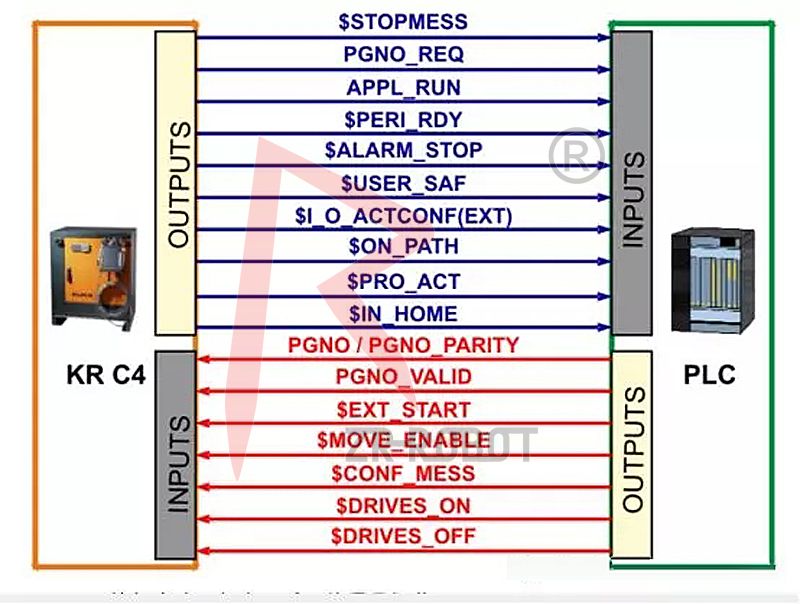
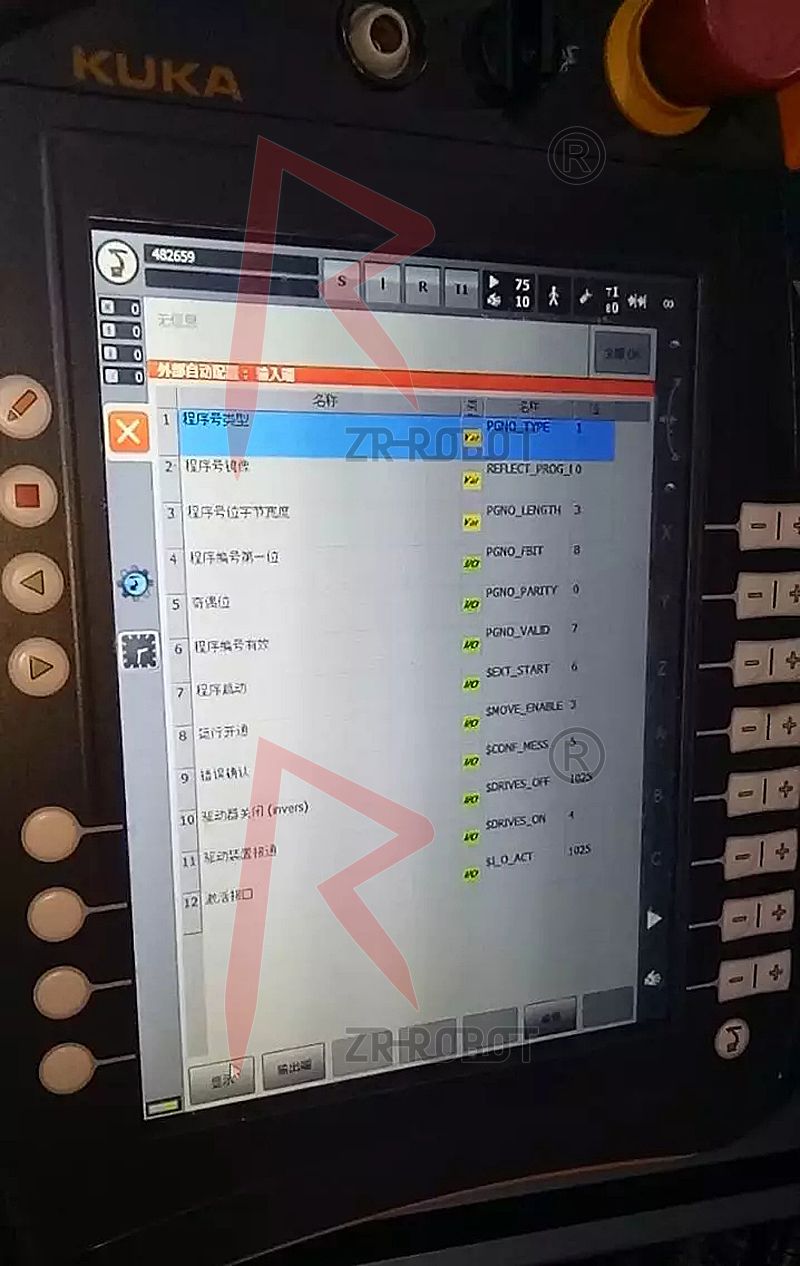
1、库卡机器人和PLC进行IO外部启动通信参数图
2、各项参数说明表
(1)机器人输入端信号参数含义
序号
输入
参数
参数描述
1
PGNO_TYPE
此变量确定了以何种格式来读取上级控制系统传送的程序编号。
为1值时:以二进制数值读取:上级控制系统以二进制编码整数值的形式传递程序编号。例如:0 0 1 0 0 1 1 1=> PGNO=39
为2值时:以 BCD 值读取。上级控制系统以二进制编码小数值的形式传递程序编号。例如:0 0 1 0 0 1 1 1=> PGNO=27
为3值时:以 “N 选 1” 的形式读取 ,上级控制系统或外围设备以 “N 选 1” 的编码值传递程序编号。0 0 0 0 0 0 0 1=> PGNO=1和0 0 0 0 1 0 0 0=> PGNO=4
2
PGNO_LENGTH
程序号长度:此变量确定了上级控制系统传送的程序编号的位宽。 值域: 1 … 16。若 PGNO_TYPE 的值为 2,则只允许位宽为 4、8、12 和 16。
3
PGNO_PARITY
程序号的奇偶位:
负值:为奇校验,只读取奇数;
0:无分析,奇数和偶数都识别;
正数:为偶校验,只读取偶数
如果 PGNO_TYPE 值为 3,则 PGNO_PARITY 不被分析。
4
PGNO_VALID
程序号有效:上级控制系统传送读取程序号指令的输入端
负值:在信号的脉冲下降沿应用编号
0:在线路 EXT_START 处随着信号的脉冲上升沿应用编号。
正值:在信号的脉冲上升沿应用编号。
5
$EXT_START
外部启动:设定了该输入端后,输入 / 输出接口激活时将启动或继续一个程序 (一般为 CELL.SRC)。仅分析信号的脉冲上升沿。在外部自动运行中无 BCO 运行。 这表明,机器人在启动之后以编程设定的速度 (没有减速)到达个编程设定的位置,并且不停在那里。
6
$MOVE_ENABLE
允许运行:该输入端用于由上级控制器对机器人驱动器进行检查。
TRUE :可手动运行和执行程序
FALSE :停住所有驱动装置并锁定所有激活的指令
当驱动装置由上级控制器停住后,将显示 “ 开通全部运行 ” 的信息提示。 删除了该信息提示并且重新发出外部启动信号后机器人才能重新运动。投入运行时变量 $MOVE_ENABLE 常常设计为值 $IN[1025]。 如果此后忘记设计另一个输入端,则不能外部启动。
7
$CONF_MESS
确认信息提示(错误复位):通过给该输入端赋值,当故障原因排除后,上级控制器将自己确认故障信息,上升沿有效。
8
$DRIVES_ON
驱动装置接通:如果在此输入端上施加了持续至少 20 毫秒的高脉冲,则上级控制系统会接通机器人驱动装置。
9
$DRIVES_OFF
驱动装置关闭:如果在此输入端上施加了持续至少 20 毫秒的低脉冲,则上级控制系统会关断机器人驱动装置。
(2)机器人输出端信号参数含义
序号
输出
参数
参数描述
1
$ALARM_STOP
紧急停止:出现紧急停止时可从输出端 $ALARM_STOP 和 Int. NotAus 的状态看出是哪种紧急停止:两个输出端均为 FALSE: 触发了库卡控制面板 (KCP)上的紧急停止按键$ALARM_STOP FALSE, Int. NotAus TRUE: 外部紧急停止
该输出端将在出现以下紧急停止情形时复位:
1)按下了库卡控制面板 (KCP)上的紧急停止按键。(内部紧急关断)
2)外部紧急停止
2
$USER_SAF
操作人员防护装置 / 防护门:该输出端在打开护栏询问开关 (运行方式 AUT)或放开确认开关 (运行方式 T1 或 T2)时复位。
3
$PERI_RDY
驱动装置处于待机状态:通过设定此输出端机器人控制系统通知上级控制系统机器人驱动装置已接通。
4
$STOPMESS
停止信息:该输出端由机器人控制系统来设定,以向上级控制器显示出现了一条要求停住机器人的信息提示。 (例如: 紧急停止按键、运行开通或操作人员防护装置)
5
$I_O_ACTCONF
外部自动运行激活:选择了外部自动运行这一运行方式并且输入端 $I_O_ACT 为 TRUE(一般始终设为 $IN[1025])后,输出端为 TRUE。
6
$PRO_ACT
程序激活 / 正在运行:当一个机器人层面上的过程激活时,始终给该输出端赋值。 在处理一个程序或中断时,过程为激活状态。 程序结束时的程序处理只有在所有脉冲输出端和触发器均处理完毕之后才视为未激活。
7
PGNO_REQ
程序号问询:在该输出端信号变化时,要求上级控制器传送一个程序号。如果 PGNO_TYPE 值为 3,则 PGNO_REQ 不被分析。
8
APPL_RUN
应用程序在运行中:机器人控制系统通过设置此输出端来通知上级控制系统机器人正在处理有关程序。
9
$IN_HOME
机器人位于起始位置 (HOME):该输出端通知上级控制器机器人正位于其起始位置 (HOME)。
10
$ON_PATH
机器人位于轨迹上:只要机器人位于编程设定的轨迹上,此输出端即被赋值。 在进行了 BCO运行后输出端 ON_PATH 即被赋值。 输出端保持激活,直到机器人离开了轨迹、程序复位或选择了语句。 但信号 ON_PATH 无公差范围,机器人一离开轨迹,该信号便复位。
四、库卡机器人外部启动IO配置
1、酷卡机器人初次使用IO分配
(1)输入端
系统输入信号
硬件输入信号
in1-in16
di1-di16
系统输出信号
硬件输信号
out1-out16
do1—do16
酷卡机器人系统数字输入1-4096取出1-16配对硬件di1-di16;
酷卡机器人系统数字输出1-4096取出1-15配对do1-do16;
2、外部启动IO配置
(1)输入端:
$move_enable运行开通,常闭信号。断开后手动/自动无法运行。
$drives_off伺服断开,常闭信号。下降沿有效,断开机器人伺服断。
$drives_on伺服接通,常开信号。上升沿有效。
$conf_mess错误复位,上升沿有效。
$ext_start程序启动,上升沿有效,脉冲信号。
$pgno_parity奇偶校验,下降沿奇校验,上升沿偶检验,0无校验。
$pgno_valid程序号有效。
(2)输出端:
$pgno_req程序号请求,PLC接到这个信号要给机器人程序号。
$peri_rdy伺服上电完成。
$stopmess停止信息,常闭。(例如:紧急停止按键、运行开通或操作人员防护装置)
五、库卡机器人操作过程
1、编程和调试(见上面程序)
程序画面:
2、外部IO接线
(1)说明:这里库卡机器人数字输入和数字输出接线均为24V,使用外部开关电源供电。
(2)CAD电气接线图:

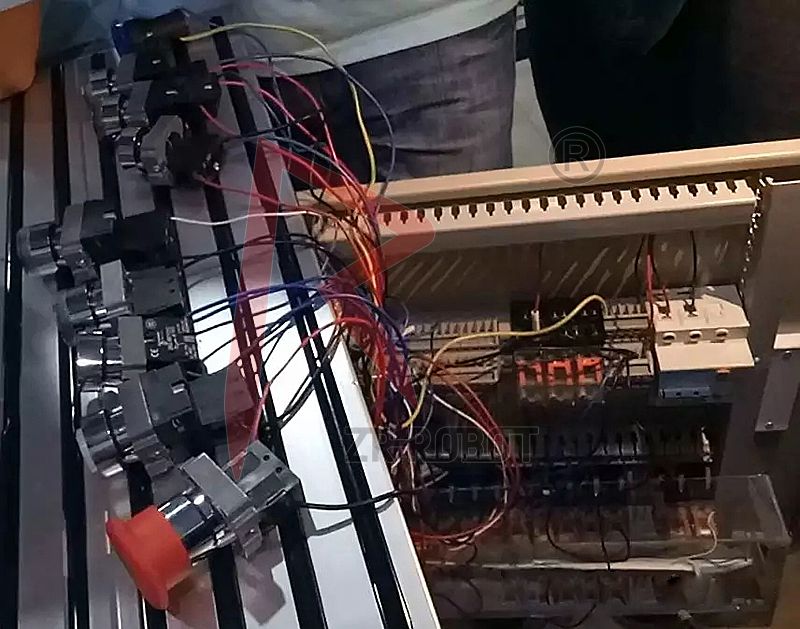
(2)实物接线图:
3、外部IO启动配置图片(记得验证接线信号)
IO配置说明:
驱动器关闭和激活接口配1025库卡机器人常闭点;
机器人运行开通接di3,常闭点;
机器人复位信号接di5;
机器人上电信号接di4;
机器人外部启动信号接di6;
机器人程序编号有效信号接di7;
机器人奇偶位有效设定为0,即不管外部IO选择的程序编号是奇数还是偶数都生效;
机器人程序号位位di8;
机器人程序编号读取信号组成宽度为3位,即di10、di9、di8三个数字输入信号组合为程序号,程序编号范围为0-7;
机器人程序外部IO识别为1:以二进制数值读取。
4、外部运行操作过程
(1)手动选择Cell.src程序,并且运行值BCO点;
(2)钥匙开关切换到外部运行模式;
(3)通过接线按钮进行机器人错误和信息复位$conf_mess;
(4)机器人上电信号按钮$drives_on;
(5)机器人启动信号按钮$ext_start,这时候机器人会在示教器信息栏提示输入请通过外部IO选择程序执行,例如下图:
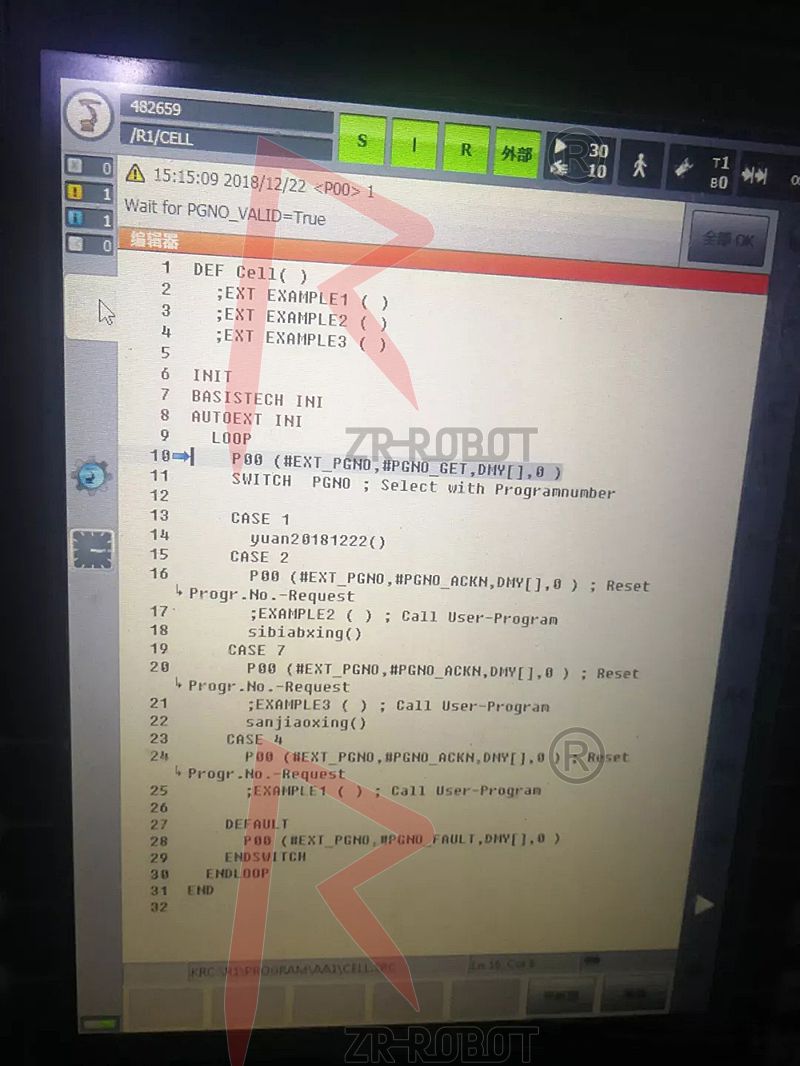
(6)根据情况通过外部IO选择不同的程序CasePROG执行;
(7)每次执行完Case,机器人会重新提示信息,输入对应的IO选择不同程序进行继续执行。
5、操作过程视频
说明:这里暂不上传操作视频。
库卡机器人控制柜图片:

库卡机器人KUKASMartPad示教器图片:
正面:
背面:

更多咨询:库卡机器人配件

- 下一篇:库卡机器人KR4赋能3C行业
- 上一篇:kuka库卡机器人多少钱一个?